Ziheng Liu

Ph.D. Student (2022- )
University of Utah
Research Interests:
• Physics-based Simulation
• Motion Capture
• Digital Fabrication
• Robotics
• Computer Graphics
📧 first_name.last_name at utah dot edu
📍 3335 Merrill Engineering Building @ UofU
Links:
I am a Ph.D. student at Kahlert School of Computing, the University of Utah, starting from 2022. I am co-advised by Professor Jenny Lin and Professor Cem Yuksel. Before that, I was managed by Professor Yin Yang.
I grew up in Shanghai, China, and received my Bachelor’s Degree in Computer Science from Peking University, China in 2020. Before moving to the U of U and changing my research area to computer graphics in 2022 Fall, I was studying computer networks at Georgia Tech.
Publications
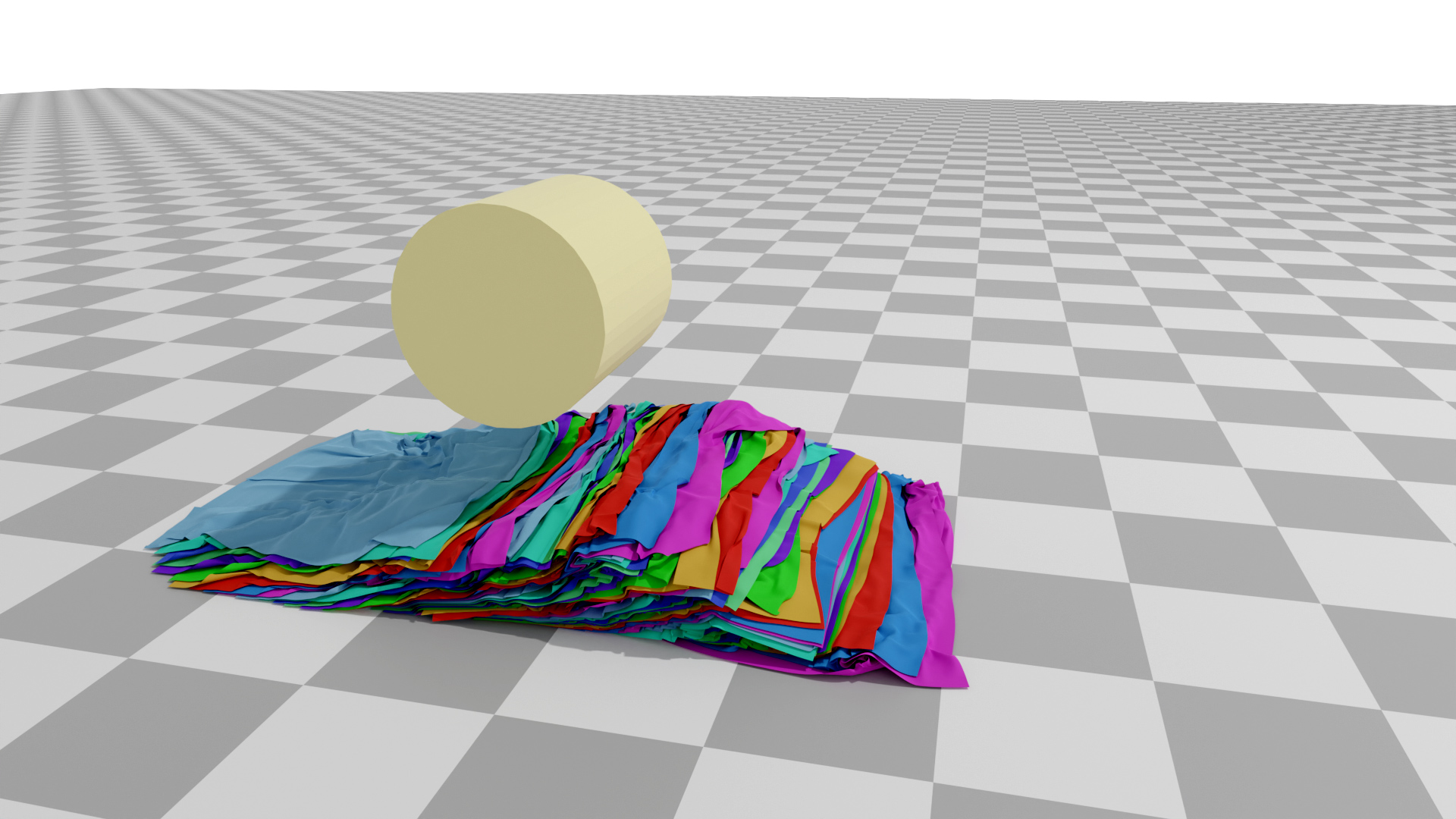
High-performance CPU Cloth Simulation Using Domain-decomposed Projective Dynamics
Zixuan Lu*, Ziheng Liu* (*equal contributors), Lei Lan, Huamin Wang, Yuko Ishiwaka, Chenfanfu Jiang, Kui Wu, Yin Yang
ACM Transactions on Graphics (SIGGRAPH), 2025 Technical Papers Awards: Honorable Mentions
🔗 Project Page

Vertex Block Descent
Anka He Chen, Ziheng Liu, Yin Yang, Cem Yuksel
ACM Transactions on Graphics (SIGGRAPH), 2024
🔗 Project Page

Offset Geometric Contact
Anka He Chen, Jerry Hsu, Ziheng Liu, Miles Macklin, Yin Yang, Cem Yuksel
ACM Transactions on Graphics (SIGGRAPH), 2025
🔗 Project Page
RECIPE: Rateless Erasure Codes Induced by Protocol-Based Encoding
Jingfan Meng, Ziheng Liu, Yiwei Wang, Jun Xu
2023 IEEE International Symposium on Information Theory (ISIT)
Space- and Computationally-Efficient Set Reconciliation via Parity Bitmap Sketch (PBS)
Long Gong, Ziheng Liu, Liang Liu, Jun Xu, Mitsunori Ogihara, Tong Yang
Proceedings of the VLDB Endowment, Volume 14, Issue 4 (2020)
Multi-copy cuckoo hashing
Dagang Li, Rong Du, Ziheng Liu, Tong Yang, Bin Cui
2019 IEEE 35th International Conference on Data Engineering (ICDE)
Open Source Project
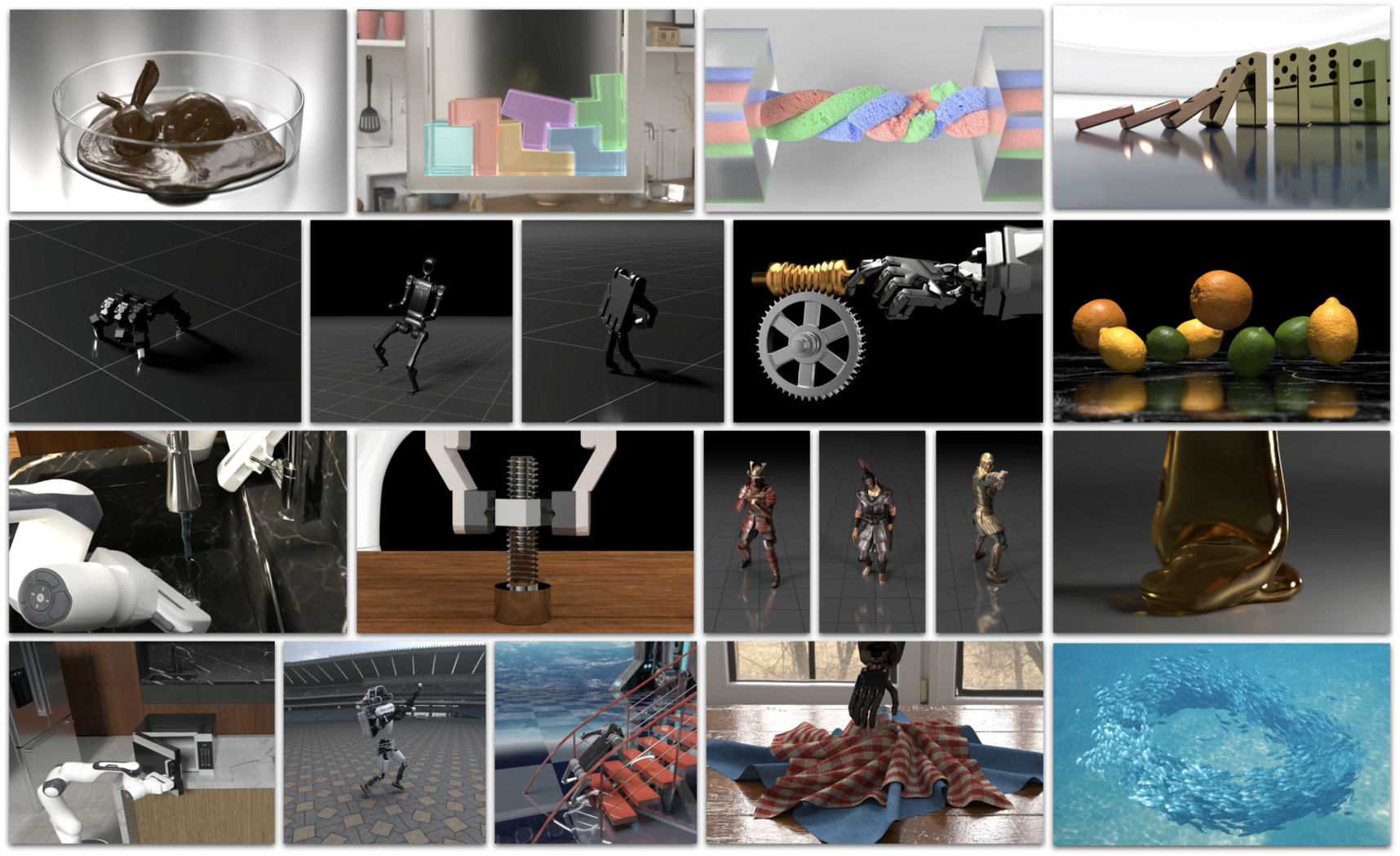
Contributed to Genesis, a physics platform designed for general-purpose Robotics/Embodied AI/Physical AI applications.
🔗 Project Page